


Hybrid Robotic Spacecraft and Rovers for Advanced Space Exploration
The latest breakthrough in space exploration reveals that small celestial bodies hold valuable information about the origin of our solar system. To effectively study these miniature worlds, a systematic and cost-effective approach is required. One potential solution is to deploy robotic platforms throughout the solar system.
Marco Pavone, an assistant professor at Stanford University and a research affiliate at NASA’s Jet Propulsion Laboratory, is exploring a groundbreaking concept through the NASA Innovative Advanced Concepts (NIAC) Program. His research, titled “Spacecraft/Rover Hybrids for the Exploration of Small Solar System Bodies,” aims to investigate comets, asteroids, and the moons of Mars, namely Phobos and Deimos.
Pavone’s work focuses on developing robotic platforms that possess both speed and precision in navigating the surfaces of these small celestial bodies. By conducting on-site robotic investigations, not only can we gain insights into the formation of our solar system, but we can also enhance the technologies necessary for future human exploration of Earth.
Pavone’s vision is to revolutionize solar system exploration through significant advancements and breakthroughs.
Making Use of Reduced Gravity
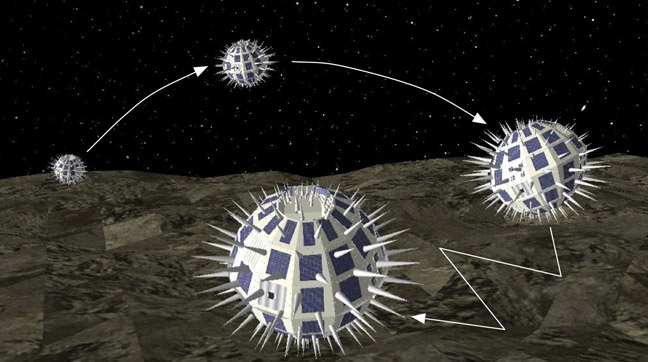
Initially, the concept of a robot falling may raise concerns, but Pavone envisions this as a unique method for traversing other celestial bodies. The objective is to utilize the reduced gravity found on small bodies.
Pavone’s mobility platforms would be deployed by a main spacecraft. Once on the surface of a small body, each platform would activate and begin its operations. By hopping, the platforms could cover long distances on these distant worlds. For shorter journeys to specific locations, the platforms would perform controlled tumbles. Additionally, the platforms could execute high-altitude jumps to reach different points.
According to Pavone, “The proposed robotic platforms would function as spacecraft/rover hybrids, capable of accessing most destinations on virtually any small body.” By employing multiple platforms, the terrain of a small body could be thoroughly observed, sampled, and measured. Another advantage of using multiple units is that the failure of one hybrid would not result in the termination of the entire mission.This NIAC-supported investigation allows Pavone to draw upon his expertise in various fields, including control theory, autonomous systems, coordination of multi-robot networks, formation flying, and bio-inspired robotics.
“The systematic exploration of small bodies would contribute to unraveling the origins of the solar system and its early development, as well as assessing their astrobiological significance,” Pavone explains. “Furthermore, we can evaluate the potential resources of small bodies in preparation for future human missions beyond Earth.”
This article is republished from PhysORG under a Creative Commons license. Read the original article.
Do not forget to share your opinion with us to provide you with the best posts !





0 Comments